- 在線諮詢
- 返回頂部
歡迎光臨長泰化學工業 ( 惠州 ) 有限公司官方網站!

+86-752-687-3099


NEWS
公司資訊

張躍院士/廖新勤/陳忠等人AFM:《百變星君》之百變機器人皮膚
《百變星君》講述了阿星因得罪黑幫遭轟殺至粉身碎骨,後由教授將其改造為能變化多種形態的人造人復活,最終通過置入教授發明的晶片實現各種形態的變形,最終打敗黑幫製造的鐵甲威龍。
在人與智慧型機器的互動中,觸覺感知是一種直觀且令人驚歎的體驗。想像一下,未來的機器人不僅能夠理解你的語言,還能通過感知到你的觸摸,回饋溫度、壓力甚至是輕柔的撫摸。然而,現有的人工皮膚設計在多功能性與可持續性之間仍然面臨著困境——它們往往只能包含特定功能,除非改變成分,否則無法按照重構性能和改變功能。而且,在目前的設計中,人工皮膚即使能實現回收,也多為定向回收。這意味著,材料只能被拆解成特定的用途,無法重新設計組合,實現功能為導向的感測器性質定制。這種局限性嚴重影響了未來智慧型機器的可持續發展與擴展性。
為了解決這一挑戰,北京科技大學張躍院士和廈門大學廖新勤、陳忠等人提出一種基於材料基因表達調控的可變機器皮膚。相關研究以“Alterable Robotic Skin Using Material Gene Expression Modulation”為題發表在《Advanced Functional Materials》上,展示了通過材料基因表達調控實現功能單元可重構的機器人皮膚設計。這種人工皮膚不僅具備功能單元的可重構能力,還能實現靈活的性質定制,使得機器人在結構和功能上更貼近原始自然的皮膚。
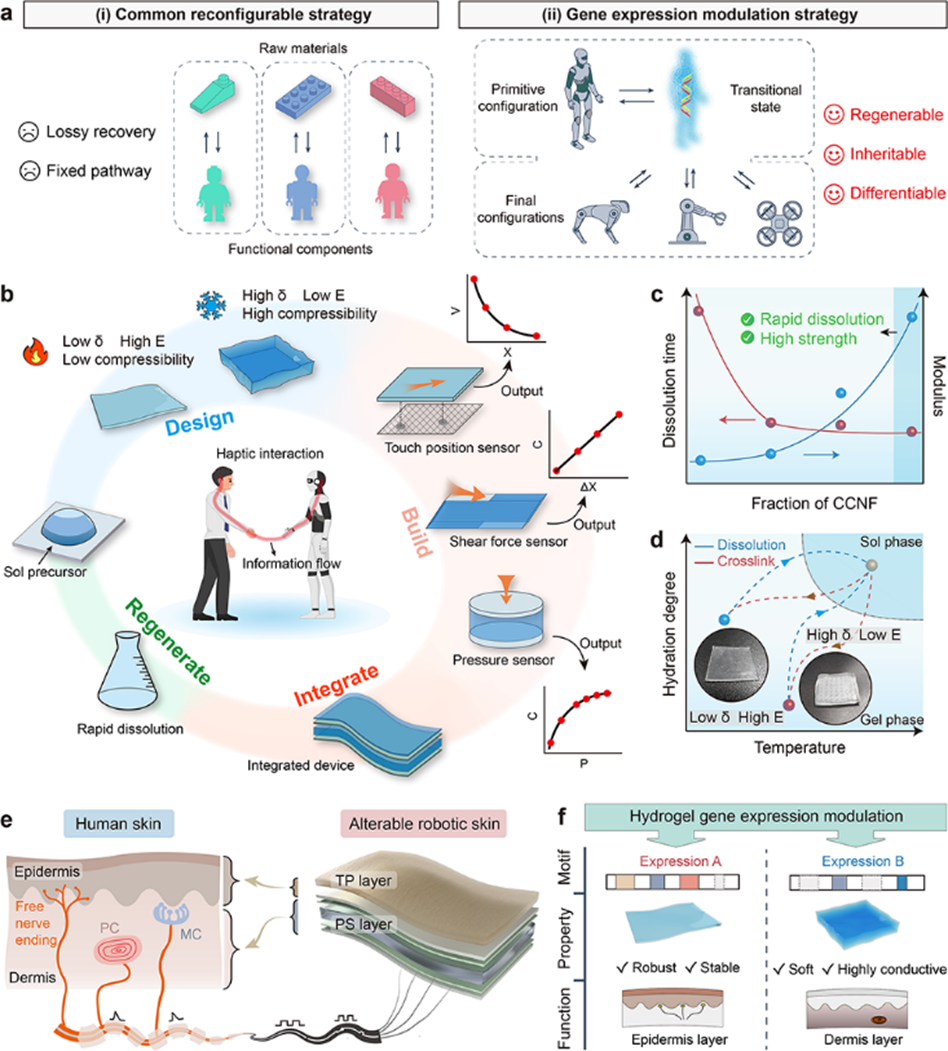
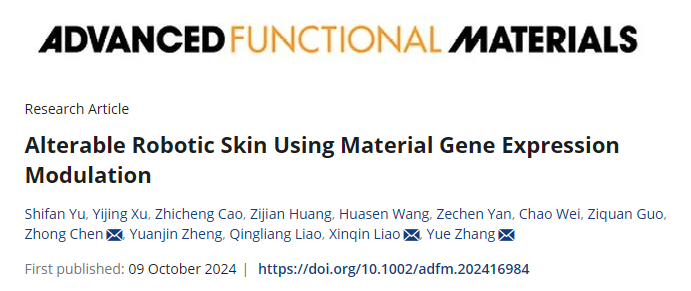
圖1 可變機器人皮膚的設計概念圖
通過借鑒生物系統中的基因表達原理,研究團隊設計了一種具有可變特性的機器人皮膚,其核心原理為:水凝膠材料基元通過熱聚合和冷凍聚合等不同誘導條件下展現特異的功能屬性,可分別作為仿生機器人皮膚的觸摸定位功能層和壓力感知功能層(圖1a)。本文介紹了一個可持續的製造框架,包括設計、製造、整合和再生階段。該框架允許功能電子元件的靈活回收和重建,以滿足不斷變化的需求,為人工智慧系統帶來顯著的可擴展性和可持續性(圖1b)。與傳統的功能單一的傳感方案不同,這種設計允許源於組分的均質材料基元僅通過誘導條件變化從而啟動多種觸摸感知功能,比如位置、壓力和動態觸覺等。這種可變性顯著提升了系統的多功能性和可持續性,降低了材料複雜性,並通過同質化結構的重新構建,實現了不同功能單元的定制化組合(圖1e-f)。
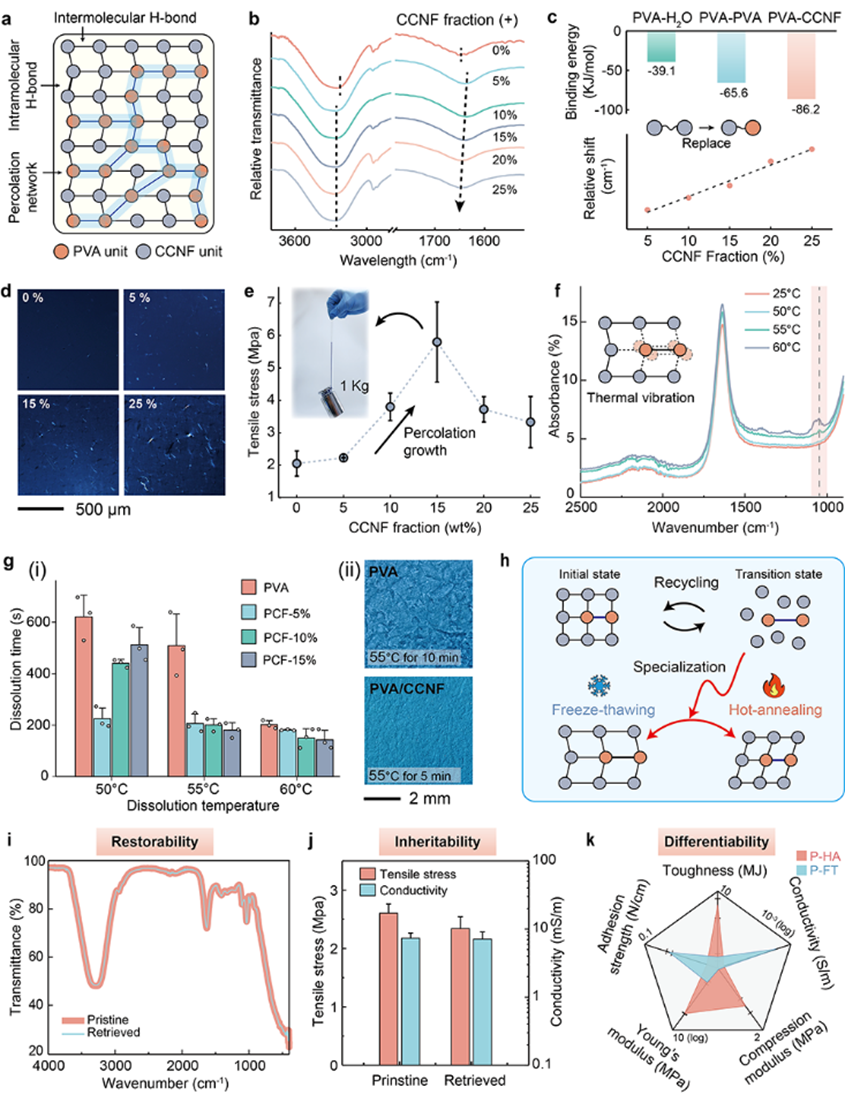
圖2 快速溶解和高強度的交聯滲透複合水凝膠
研究團隊提出了一種交聯-滲透複合水凝膠網路:通過在本征聚乙烯醇(PVA)水凝膠網路中引入第二相羧基化纖維素納米纖維(CCNF)滲透網路來構建複合網路(圖2a-d)。複合網路解決了一般可回收網路無法兼顧高機械強度和可回收便利性的難題。其中,纖維滲透網路可以在本征氫鍵網路內形成第二網路,提高整體的機械強度(圖2e),且促進體系離子電導率;而且,羧基化纖維素表面的羥基基團可作為占位鍵,抑制PVA本征網路的硬化,獲得低熱水解溫度(圖2f-g)。基於水凝膠的機器人皮膚具有狀態可復原、性質可繼承和功能可分化的三個特點,建立了生物組織基因表達與人工系統智慧製造之間的聯繫(圖i-k)。
圖3 觸覺定位層的設計與性能測試
研究者展示了熱誘導聚合水凝膠用作觸摸定位層(TP層)的設計機制與性能測試。熱誘導聚合水凝膠的高強度、高穩定性和低電信號漂移特性適用于機器人皮膚的觸摸定位層。研究者採用四電極結構,結合位置矯正演算法,實現了大面積、全區域的高精度觸摸定位(圖3a-c)。基於超快回應(<10ms)和超低誤差(均方誤差低於3%)的觸摸定位板展示了高精度觸摸定位、普適性手寫辨識等功能(圖3d-i)。在回收復用製造後,傳感信號以及識別功能仍然保持(圖3j-k)。

圖4 壓力感應層的結構和性能測試
研究者展示了冷凍誘導聚合水凝膠用作壓力傳感層(PS層)的設計機制與其對不同壓力的回應性能(圖4a-b)。冷凍誘導聚合水凝膠的高離子導電率提升壓力感知信號、柔軟特性更能賦予PS層更貼近皮膚組織的體驗。研究團隊採用凍融交聯的水凝膠層,結合半球形微結構設計,大幅提升了壓力感應的靈敏度(圖4c-e)。PS層不僅能夠感知靜態壓力,還可以通過分析觸覺動作的頻率和強度信號,區分不同的觸覺模式,如拍、打擊、撓等,這在觸覺互動中的應用潛力巨大(圖4f-g)。
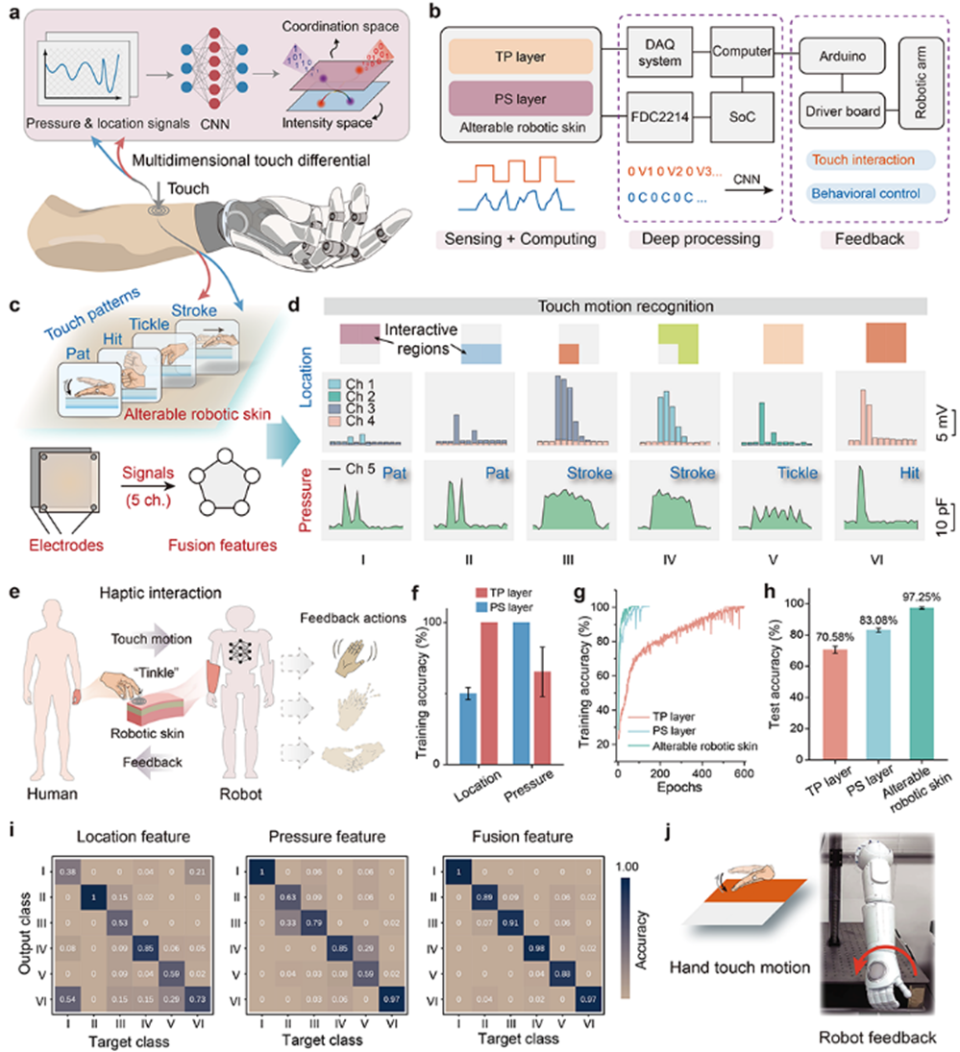
圖5 觸覺互動系統的應用場景
研究者開發了一套完整的觸覺互動系統,以驗證兩種感知層的協同工作性能。可變機器人皮膚能夠通過捕獲多種觸摸模式的觸覺資訊(如拍打、撫摸等),並基於這些觸覺信號驅動機器人做出相應的動作(圖5a-d)。傳感模式集成實現融合觸覺資訊的高效識別,可用於基於觸摸壓力與位置的人機觸覺交互。該系統僅需五個資料通道就可以傳輸全面積內的觸摸位置和壓力資訊,通過結合位置信號與壓力信號的多模態分析,顯著提升了對複雜觸覺運動的識別精度(高達97.25%)(圖5e-j)。這一系統展現了可變機器皮膚在交互場景中的高效資訊處理和回饋能力,在教育娛樂、智慧型機器人和仿生義肢等領域具有潛在應用價值。小結研究者提出了一種基於材料基因表達調控的可變機器皮膚,能夠在同一材料系統中實現多種功能的動態重構,如觸覺定位和壓力感知。通過納米纖維複合水凝膠的交聯設計,該皮膚不僅具備高機械強度,還具有快速溶解和重構的能力,實現了可持續迴圈使用。觸覺定位層具備高精度的觸摸位置檢測,而壓力感應層能夠靈敏地感知並區分不同的壓力和觸摸模式。在集成模式下,該機器人皮膚基於精簡資料卻實現全區域內的協同感知。這種創新設計為柔性電子、仿生義肢和智慧型機器人領域帶來了全新的應用前景。
來源:高分子科學前沿
免責聲明:本內容來自騰訊平臺創作者,不代表騰訊新聞或騰訊網的觀點和立場。